



電壓不穩定的狀況在(zài)日常生活中常常發生,那電壓不穩定(dìng)會對升降機有哪些不良(liáng)影(yǐng)響呢?下邊追隨我一起來討論(lùn)了解一下(xià)吧!
一、電壓稍低的(de)狀況:電源電壓(yā)過(guò)低時,磁感應(yīng)轉距便會減少,假如負荷轉矩沒有減少,電機轉子轉速過低,這時轉差(chà)率擴大導致電動機(jī)負載而發燙,長期會(huì)危(wēi)害電(diàn)機使用(yòng)壽命。
二、電壓偏高的狀況(kuàng):在電機運作環節中假(jiǎ)如發覺電源(yuán)電壓偏高,勵磁電流電流量擴大,電動機會太過發燙,太過的高電壓會困境(jìng)電動機的絕緣層(céng),使(shǐ)其有被穿透的風(fēng)險(xiǎn)。
三、三相電壓不(bú)穩定時:當三相電壓不(bú)對稱時,即一(yī)相電壓偏高或稍低時,會造成某(mǒu)相電壓過大,電動機發燙(tàng),與此同時轉矩減少會傳出“翁嗡”聲,時(shí)間長會毀壞繞阻(zǔ)。改裝大一(yī)些的變電器是對策(cè)。 



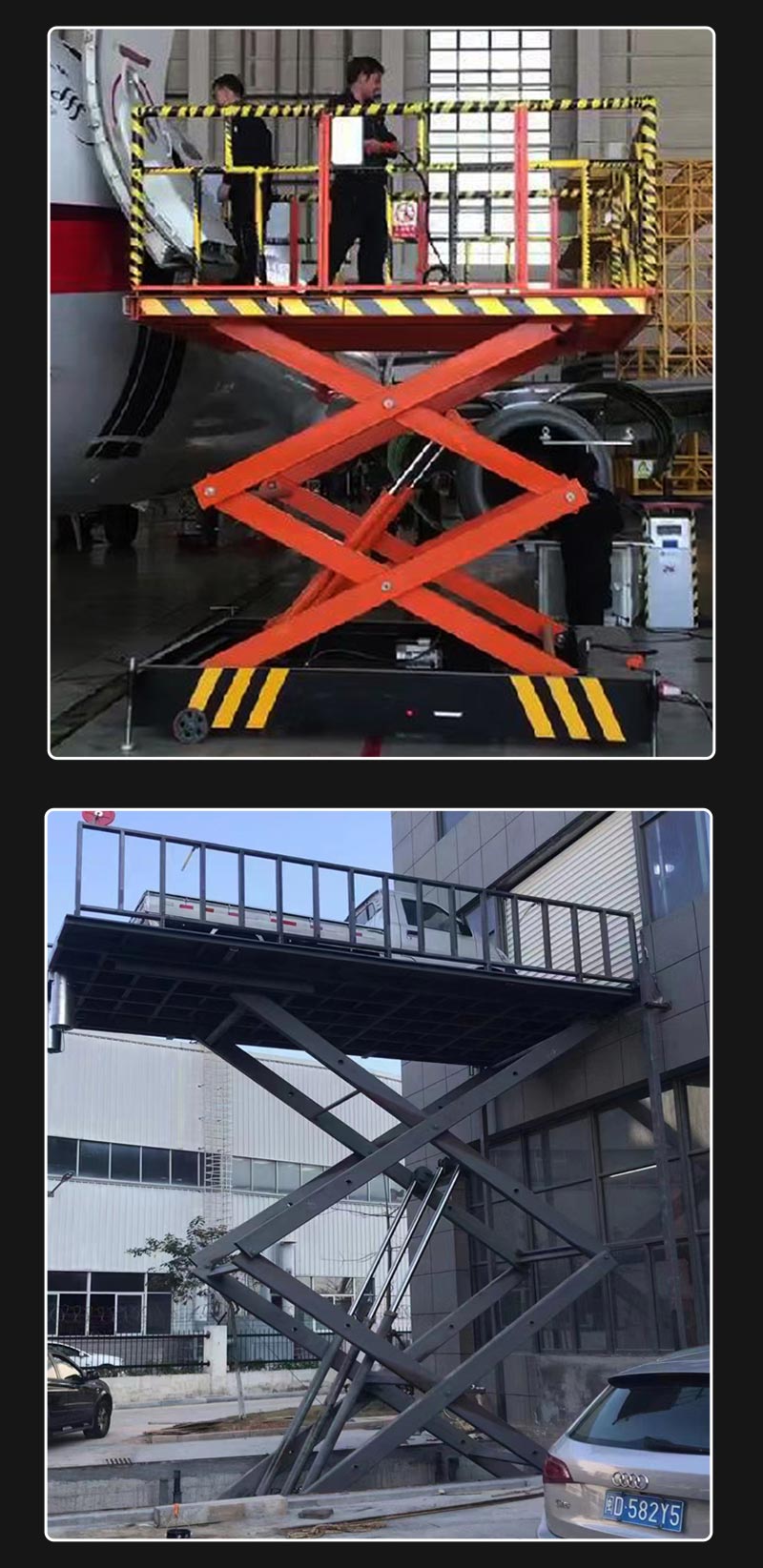
為了更好的使用高空作(zuò)業平台,接下來為大家介紹一(yī)下高空作業平台主(zhǔ)要由那些部分組成,希望以(yǐ)下介紹對大(dà)家有所幫助。
gkzypt.png
高空作業(yè)平台主要由以下四部分組成:工作機構、底盤、臂架結構、動力裝(zhuāng)置、控製係統(tǒng)。
一、工作(zuò)機構
高空作業平台車普通設有變幅機構、回轉機構、平(píng)衡機構和行走機構。變幅(fú)機構和回轉機構完成載人工(gōng)作鬥(dòu)一在水平和垂自方向的移(yí)動(dòng),平衡機構完成(chéng)工作鬥和水平(píng)而之間的(de)夾(jiá)角堅持小變,行(háng)走機構完成轉移工作場所。變幅機(jī)構擴展了高空車的作業範圍。
二、底盤、臂架(jià)結構
金屬結構是高(gāo)空作業車的重要組(zǔ)成部分。它承受高空作業車的自重(chóng)以及作業時的各(gè)種(zhǒng)外載(zǎi)荷,其重量通常占整機重量的一半(bàn)以上,因此,高空作業車金屬(shǔ)結構的介理(lǐ)設(shè)計(jì),對減(jiǎn)輕高(gāo)空作業車自重,進(jìn)步作(zuò)業性(xìng)能,節約鋼材,進步高空車的可靠(kào)性都有重要意義。
三、動力裝置
動力裝(zhuāng)置是高(gāo)空作業車的動力(lì)源,裝置需求(qiú)的功率小大(dà),普通為幾十K。
四、控(kòng)製裝置
控製係統包(bāo)括支配裝置、執行(háng)元件和(hé)女全裝置。采用電氣液壓支配完成機構的起動、調速、換(huàn)向、製動和中止。執行元件用來推進結構件完成動(dòng)作。安全(quán)裝置用來檢測風險工況保(bǎo)證工作(zuò)安全


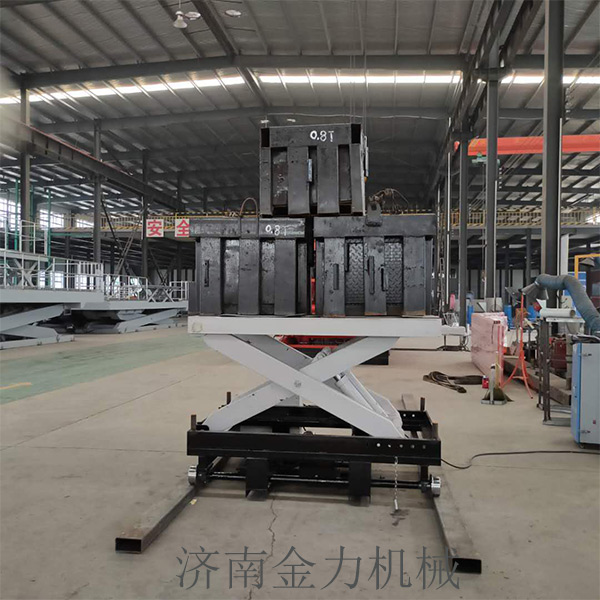
自行式升降(jiàng)機不需要外力牽引便可控製其行走至作業地點,也不(bú)需要打開支腿就可以進行高空升降作業,能(néng)夠在不同工作(zuò)狀態下(xià)作業。它主要依靠係統內(nèi)部設定好(hǎo)的速度調節功能進(jìn)行快速(sù)、慢速行走,登高作業人員隻要在平台上麵操作便(biàn)可在空中連續完成上下、前(qián)進、後退、轉向等所有動(dòng)作。該設備(bèi)采用電瓶動力驅(qū)動,特別適合用於大廳管線及電路設施維護、廠房(fáng)車間(jiān)內工業機械保(bǎo)養維修、新建廠房倉庫內消防(fáng)配套設施架設等作業環(huán)境,在室外使用時(shí),使(shǐ)用效果隨著廠(chǎng)家提供的使用說明書的風速不同而不同。下麵給大(dà)家分(fèn)享一下該設備的操作(zuò)方法。
1、平台升起(qǐ)後,在平整地麵上(shàng)的行駛速度不得超過0.8公裏/小時;
2、自行式升降機在收攏狀態下,行(háng)駛在凹凸不(bú)平、有碎石、不穩定或容易打滑、靠近洞口和陡坡等環境中時(shí),要小心並降低(dī)行駛(shǐ)速度;
3、設備隻有在堅固、平坦(tǎn)的地麵上方才能夠進行(háng)升降作業;
4、當平台升起後,不能在(zài)不平坦、不堅固(gù)的地形或其他危險狀況下行駛,也(yě)不(bú)能在上(shàng)述環境附近行(háng)駛;
5、設備自帶傾斜預警裝置,每次(cì)進行(háng)高空作業前都應仔細觀察,上升時一定要保證設(shè)備不傾斜。








 在線客服(fú)
在線客服(fú) 15665709458
15665709458 1574931819@qq.com
1574931819@qq.com


